Tesla Software Release 2022.45
Last updated 27-Apr-2026
Tesla Software release 2022.45 including Minor Fixes, Full Self-Driving (Beta), FSD Beta v11.3.1, Over-the-Air (OTA) recall, Full Self Driving (Beta) Suspension, Driving Visualization Improvements, Cabin Camera, Steam (Beta), Apple Music, FSD Beta v11.3.2, Over-the-Air (OTA) recall, FSD Beta v11.3.1, Extras, Park Assist, FSD Beta v11.3.3, Over-the-Air (OTA) recall, FSD Beta v11.3.4, Over-the-Air (OTA) recall, Park Assist Issues, FSD Beta v11.3.5, Over-the-Air (OTA) recall, FSD Beta v11.3.6, Over-the-Air (OTA) recall, FSD Beta 11.3 (2022.45.5).
Included releases
2022.45.10, (no cars) 2022.45.11, (no cars) 2022.45.12, (no cars) 2022.45.13, (no cars) 2022.45.14, (no cars) 2022.45.15, (no cars) 2022.45.5, (no cars)
Regional coverage by model
North America-----Europe-----RoW-----
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
FSD Beta v11.3.6 (part of 2022.45.15)
Autopilot Improvements
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
- Improved recall for close-by cut-in cases by 15%, particularly for large trucks and high-yaw rate scenarios, through an additional 30k auto-labeled clips mined from the fleet. Additionally, expanded and tuned dedicated speed control for cut-in objects.
- Improved the position of ego in wide lanes, by biasing in the direction of the upcoming turn to allow other cars to maneuver around ego.
- Improved handling during scenarios with high curvature or large trucks by offsetting in lane to maintain safe distances to other vehicles on the road and increase comfort.
- Improved behavior for path blockage lane changes in dense traffic. Ego will now maintain more headway in blocked lanes to hedge for possible gaps in dense traffic.
- Improved lane changes in dense traffic scenarios by allowing higher acceleration during the alignment phase. This results in more natural gap selection to overtake adjacent lane vehicles very close to ego.
- Made turns smoother by improving the detection consistency between lanes, lines and road edge predictions. This was accomplished by integrating the latest version of the lane-guidance module into the road edge and lines network.
- Improved accuracy for detecting other vehicles' moving semantics. Improved precision by 23% for cases where other vehicles transition to driving and reduced error by 12% for cases where Autopilot incorrectly detects its lead vehicle as parked. These were achieved by increasing video context in the network, adding more data of these scenarios, and increasing the loss penalty for control-relevant vehicles.
- Extended maximum trajectory optimization horizon, resulting in smoother control for high curvature roads and far away vehicles when driving at highway speeds.
- Improved driving behavior next to row of parked cars in narrow lanes, preferring to offset and staying within lane instead of unnecessarily lane changing away or slowing down.
- Improved back-to-back lane change maneuvers through better fusion between vision-based localization and coarse map lane counts.
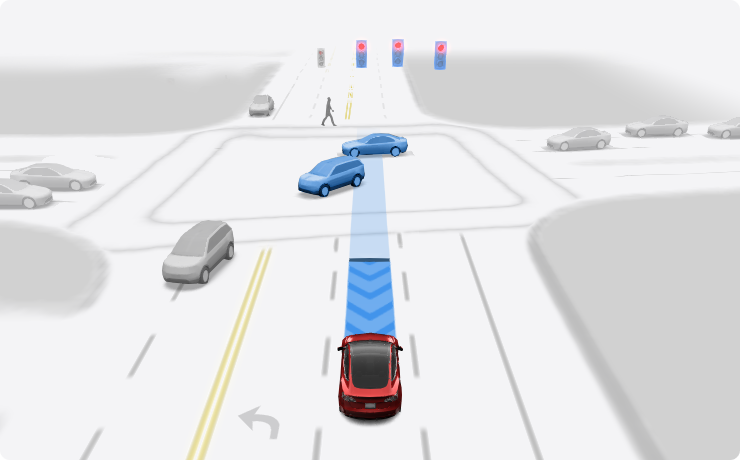
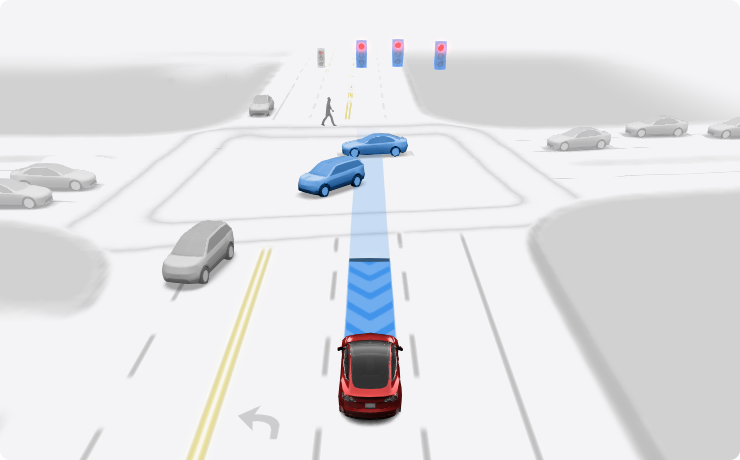
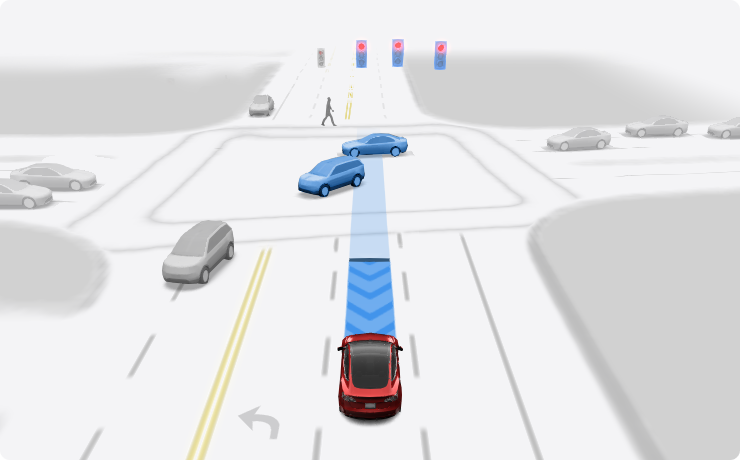
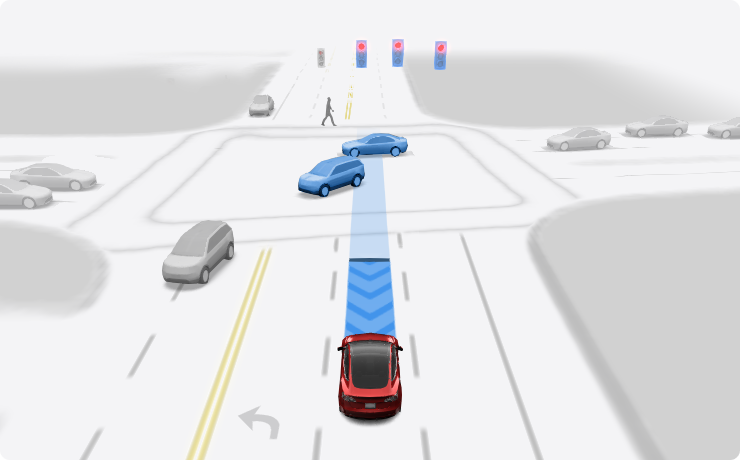
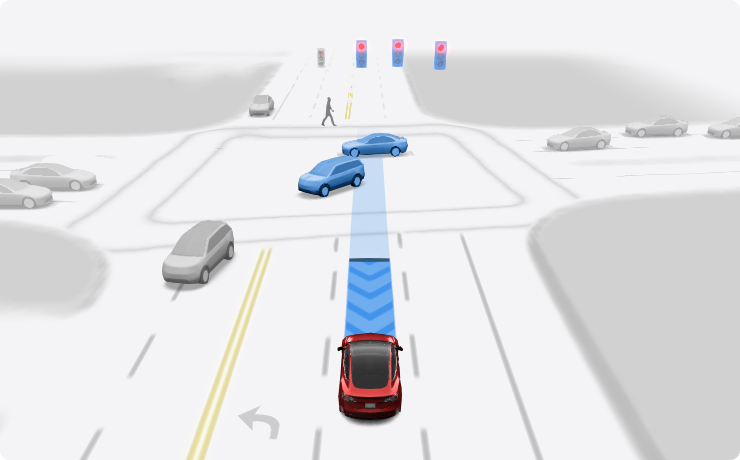
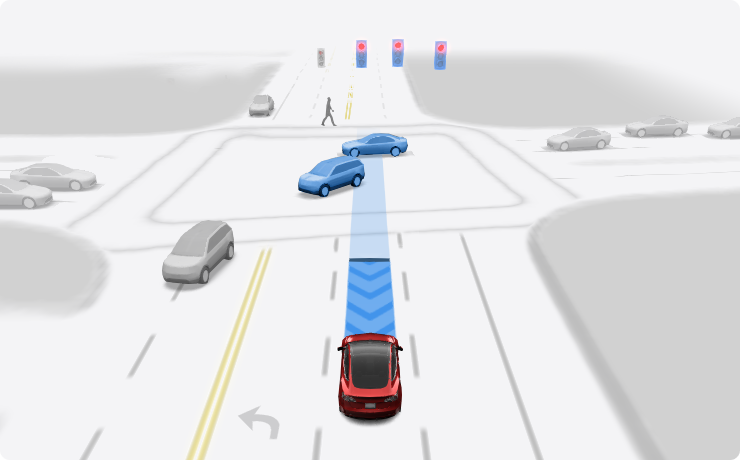
- Added text blurbs in the user interface to communicate upcoming maneuvers that FSD Beta plans to make. Also improved the visualization of upcoming slowdowns along the vehicle’s path. Chevrons render at varying opacity and speed to indicate the slowdown intensity, and a solid line appears at locations where the car will come to a stop.
- Improved the recall and precision of object detection, notably reducing the position error of semi-trucks by 10%, increasing the recall and precision of crossing vehicles over 100m away by 3% and 7%, respectively, and increasing the recall of motorbikes by 5%. This was accomplished by implementing additional quality checks in our two million video clip autolabeled dataset.
- Reduced false offsetting around objects in wide lanes and near intersections by improving object kinematics modeling in low speed scenarios.
- Adjusted position of Automatic Blind Spot Camera when FSD Beta is active to prioritize the Autopilot visualization. Drag the camera to save custom positions.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
Over-the-Air (OTA) recall (part of 2022.45.15)
Recall
In accordance with a recent recall (campaign #23V085 for US and #2023-063 for Canada), Tesla is making improvements to the following specific behaviors within FSD Beta:
1. Improved decision logic to proceed through or stop at certain yellow lights by modeling the decision as a tradeoff framework that considers estimated: deceleration required to stop, time to enter and exit the intersection, and the distance traversed across the intersection before the light transitions to red. This should make yellow light handling more natural and human-like.
2. Improved the longitudinal slowdown control profile when leading up to stop sign intersections to make the overall maneuver feel more perceptible and natural.
3. Improved the Tesla’s speed adjustment when entering certain speed zones by allowing for earlier control for detected speed limit signs. The assertiveness of the response when slowing down for detected speed limit signs is determined by the current speed and its difference to the speed indicated by the detected sign. Added a visual glow behind the speed limit icon on the user-interface to alert the driver when the vehicle’s set speed exceeds the detected speed limit by more than 50%. Finally, the option for an absolute Speed Limit offset in FSD Beta was removed; only the percent-based offset will be available.
4. Updated the behavior for certain scenarios where the Tesla may maneuver from a turn lane to continue traveling straight. These maneuvers will now be treated as a lane change, where the turn indicator is used to alert other drivers of the Tesla’s intent.
As a reminder, the driver is responsible for vehicle operation even when FSD Beta is engaged. You must constantly supervise the road, keep your hands on the wheel and be ready to intervene to maintain safety.

- Seen in CA US
- Seen on M3 MY
Park Assist (part of 2022.45.15)
Autopilot Improvements
Tesla Vision Park Assist provides visual and audio alerts of surrounding objects. This feature uses the occupancy network to predict high-definition outlines of objects 360 degrees around the car.
Note: Tesla Vision Park Assist is for guidance purposes only and is not a substitute for an aware driver. Please be attentive and avoid obstacles as required.
- Seen in CA US
- Seen on MX MX(2022+) M3 MY
Minor Fixes (part of 2022.45.15)
This release contains minor improvements and bug fixes.
- Seen in CA US
- Seen on M3 MY
Park Assist (part of 2022.45.14)
Autopilot Improvements
Tesla Vision Park Assist provides visual and audio alerts of surrounding objects. This feature uses the occupancy network to predict high-definition outlines of objects 360 degrees around the car.
Note: Tesla Vision Park Assist is for guidance purposes only and is not a substitute for an aware driver. Please be attentive and avoid obstacles as required.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
FSD Beta v11.3.5 (part of 2022.45.14)
Autopilot Improvements
This is a release in tandem with 2022.45.13 which are being sent to cars with and without parking sensors. We provide a heatmap here showing which cars are receiving this release.
We have also only seen this release being sent to 2023 model year cars which would also support this theory
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
- Improved recall for close-by cut-in cases by 15%, particularly for large trucks and high-yaw rate scenarios, through an additional 30k auto-labeled clips mined from the fleet. Additionally, expanded and tuned dedicated speed control for cut-in objects.
- Improved the position of ego in wide lanes, by biasing in the direction of the upcoming turn to allow other cars to maneuver around ego.
- Improved handling during scenarios with high curvature or large trucks by offsetting in lane to maintain safe distances to other vehicles on the road and increase comfort.
- Improved behavior for path blockage lane changes in dense traffic. Ego will now maintain more headway in blocked lanes to hedge for possible gaps in dense traffic.
- Improved lane changes in dense traffic scenarios by allowing higher acceleration during the alignment phase. This results in more natural gap selection to overtake adjacent lane vehicles very close to ego.
- Made turns smoother by improving the detection consistency between lanes, lines and road edge predictions. This was accomplished by integrating the latest version of the lane-guidance module into the road edge and lines network.
- Improved accuracy for detecting other vehicles' moving semantics. Improved precision by 23% for cases where other vehicles transition to driving and reduced error by 12% for cases where Autopilot incorrectly detects its lead vehicle as parked. These were achieved by increasing video context in the network, adding more data of these scenarios, and increasing the loss penalty for control-relevant vehicles.
- Extended maximum trajectory optimization horizon, resulting in smoother control for high curvature roads and far away vehicles when driving at highway speeds.
- Improved driving behavior next to row of parked cars in narrow lanes, preferring to offset and staying within lane instead of unnecessarily lane changing away or slowing down.
- Improved back-to-back lane change maneuvers through better fusion between vision-based localization and coarse map lane counts.
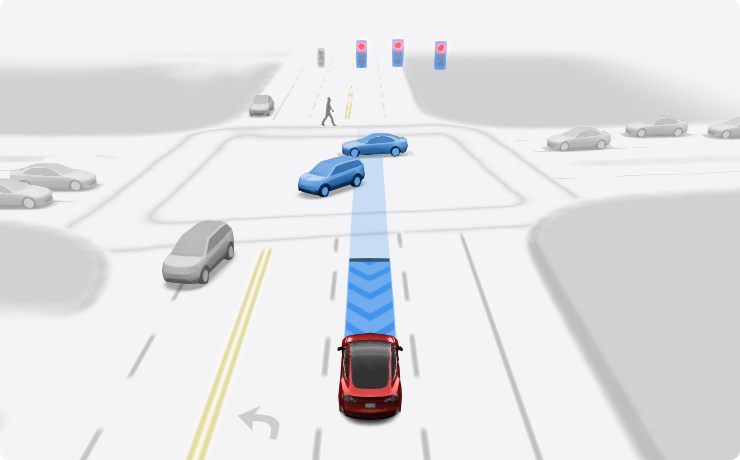
- Added text blurbs in the user interface to communicate upcoming maneuvers that FSD Beta plans to make. Also improved the visualization of upcoming slowdowns along the vehicle’s path. Chevrons render at varying opacity and speed to indicate the slowdown intensity, and a solid line appears at locations where the car will come to a stop.
- Improved the recall and precision of object detection, notably reducing the position error of semi-trucks by 10%, increasing the recall and precision of crossing vehicles over 100m away by 3% and 7%, respectively, and increasing the recall of motorbikes by 5%. This was accomplished by implementing additional quality checks in our two million video clip autolabeled dataset.
- Reduced false offsetting around objects in wide lanes and near intersections by improving object kinematics modeling in low speed scenarios.
- Adjusted position of Automatic Blind Spot Camera when FSD Beta is active to prioritize the Autopilot visualization. Drag the camera to save custom positions.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
Over-the-Air (OTA) recall (part of 2022.45.14)
Recall
In accordance with a recent recall (campaign #23V085 for US and #2023-063 for Canada), Tesla is making improvements to the following specific behaviors within FSD Beta:
1. Improved decision logic to proceed through or stop at certain yellow lights by modeling the decision as a tradeoff framework that considers estimated: deceleration required to stop, time to enter and exit the intersection, and the distance traversed across the intersection before the light transitions to red. This should make yellow light handling more natural and human-like.
2. Improved the longitudinal slowdown control profile when leading up to stop sign intersections to make the overall maneuver feel more perceptible and natural.
3. Improved the Tesla’s speed adjustment when entering certain speed zones by allowing for earlier control for detected speed limit signs. The assertiveness of the response when slowing down for detected speed limit signs is determined by the current speed and its difference to the speed indicated by the detected sign. Added a visual glow behind the speed limit icon on the user-interface to alert the driver when the vehicle’s set speed exceeds the detected speed limit by more than 50%. Finally, the option for an absolute Speed Limit offset in FSD Beta was removed; only the percent-based offset will be available.
4. Updated the behavior for certain scenarios where the Tesla may maneuver from a turn lane to continue traveling straight. These maneuvers will now be treated as a lane change, where the turn indicator is used to alert other drivers of the Tesla’s intent.
As a reminder, the driver is responsible for vehicle operation even when FSD Beta is engaged. You must constantly supervise the road, keep your hands on the wheel and be ready to intervene to maintain safety.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
FSD Beta v11.3.4 (part of 2022.45.13)
Autopilot Improvements
Now on wider release, and seems to be part of a release pair with FSDb v11.3.5 covering cars with and without USS. We provide a heatmap here showing which cars are receiving this release.
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
- Improved recall for close-by cut-in cases by 15%, particularly for large trucks and high-yaw rate scenarios, through an additional 30k auto-labeled clips mined from the fleet. Additionally, expanded and tuned dedicated speed control for cut-in objects.
- Improved the position of ego in wide lanes, by biasing in the direction of the upcoming turn to allow other cars to maneuver around ego.
- Improved handling during scenarios with high curvature or large trucks by offsetting in lane to maintain safe distances to other vehicles on the road and increase comfort.
- Improved behavior for path blockage lane changes in dense traffic. Ego will now maintain more headway in blocked lanes to hedge for possible gaps in dense traffic.
- Improved lane changes in dense traffic scenarios by allowing higher acceleration during the alignment phase. This results in more natural gap selection to overtake adjacent lane vehicles very close to ego.
- Made turns smoother by improving the detection consistency between lanes, lines and road edge predictions. This was accomplished by integrating the latest version of the lane-guidance module into the road edge and lines network.
- Improved accuracy for detecting other vehicles' moving semantics. Improved precision by 23% for cases where other vehicles transition to driving and reduced error by 12% for cases where Autopilot incorrectly detects its lead vehicle as parked. These were achieved by increasing video context in the network, adding more data of these scenarios, and increasing the loss penalty for control-relevant vehicles.
Extended maximum trajectory optimization horizon, resulting in smoother control for high curvature roads and far away vehicles when driving at highway speeds.
- Improved driving behavior next to row of parked cars in narrow lanes, preferring to offset and staying within lane instead of unnecessarily lane changing away or slowing down.
- Improved back-to-back lane change maneuvers through better fusion between vision-based localization and coarse map lane counts.
- Added text blurbs in the user interface to communicate upcoming maneuvers that FSD Beta plans to make. Also improved the visualization of upcoming slowdowns along the vehicle’s path. Chevrons render at varying opacity and speed to indicate the slowdown intensity, and a solid line appears at locations where the car will come to a stop.
- Improved the recall and precision of object detection, notably reducing the position error of semi-trucks by 10%, increasing the recall and precision of crossing vehicles over 100m away by 3% and 7%, respectively, and increasing the recall of motorbikes by 5%. This was accomplished by implementing additional quality checks in our two million video clip autolabeled dataset.
- Reduced false offsetting around objects in wide lanes and near intersections by improving object kinematics modeling in low speed scenarios.
- Adjusted position of Automatic Blind Spot Camera when FSD Beta is active to prioritize the Autopilot visualization. Drag the camera to save custom positions.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
Over-the-Air (OTA) recall (part of 2022.45.13)
Recall
In accordance with a recent recall (campaign #23V085 for US and #2023-063 for Canada), Tesla is making improvements to the following specific behaviors within FSD Beta:
1. Improved decision logic to proceed through or stop at certain yellow lights by modeling the decision as a tradeoff framework that considers estimated: deceleration required to stop, time to enter and exit the intersection, and the distance traversed across the intersection before the light transitions to red. This should make yellow light handling more natural and human-like.
2. Improved the longitudinal slowdown control profile when leading up to stop sign intersections to make the overall maneuver feel more perceptible and natural.
3. Improved the Tesla’s speed adjustment when entering certain speed zones by allowing for earlier control for detected speed limit signs. The assertiveness of the response when slowing down for detected speed limit signs is determined by the current speed and its difference to the speed indicated by the detected sign. Added a visual glow behind the speed limit icon on the user-interface to alert the driver when the vehicle’s set speed exceeds the detected speed limit by more than 50%. Finally, the option for an absolute Speed Limit offset in FSD Beta was removed; only the percent-based offset will be available.
4. Updated the behavior for certain scenarios where the Tesla may maneuver from a turn lane to continue traveling straight. These maneuvers will now be treated as a lane change, where the turn indicator is used to alert other drivers of the Tesla’s intent.
As a reminder, the driver is responsible for vehicle operation even when FSD Beta is engaged. You must constantly supervise the road, keep your hands on the wheel and be ready to intervene to maintain safety.
- Seen in CA US
- Seen on M3 MY
Park Assist (part of 2022.45.13)
Autopilot Improvements
Tesla Vision Park Assist provides visual and audio alerts of surrounding objects. This feature uses the occupancy network to predict high-definition outlines of objects 360 degrees around the car.
Note: Tesla Vision Park Assist is for guidance purposes only and is not a substitute for an aware driver. Please be attentive and avoid obstacles as required.
- Seen in CA US
- Seen on M3 MY
Park Assist Issues (part of 2022.45.13)
While Tesla Vision Park assist is in 2023.6.9, it is not without it's issues. In good light and with curbs and verticle walls, it can work reasonably well, howeverthere are a number of scenarios where it seems to fail:
- General failure to be available, especially in the dark or in rain.
- Posts can be missed completely
- Can render walls as vehicles and can even suggest an adjacent vehicle is overlapping your car
- Start up time can be 15-20 seconds once you get into the car before being active.
It is not yet parity with USS, and Tesla are still to enable auto park, summon and smart summon.
- Seen in US
- Seen on M3
Minor Fixes (part of 2022.45.13)
This release contains minor improvements and bug fixes.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
FSD Beta v11.3.3 (part of 2022.45.12)
Autopilot Improvements
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
- Improved recall for close-by cut-in cases by 15%, particularly for large trucks and high-yaw rate scenarios, through an additional 30k auto-labeled clips mined from the fleet. Additionally, expanded and tuned dedicated speed control for cut-in objects.
- Improved the position of ego in wide lanes, by biasing in the direction of the upcoming turn to allow other cars to maneuver around ego.
- Improved handling during scenarios with high curvature or large trucks by offsetting in lane to maintain safe distances to other vehicles on the road and increase comfort.
- Improved behavior for path blockage lane changes in dense traffic. Ego will now maintain more headway in blocked lanes to hedge for possible gaps in dense traffic.
- Improved lane changes in dense traffic scenarios by allowing higher acceleration during the alignment phase. This results in more natural gap selection to overtake adjacent lane vehicles very close to ego.
- Made turns smoother by improving the detection consistency between lanes, lines and road edge predictions. This was accomplished by integrating the latest version of the lane-guidance module into the road edge and lines network.
- Improved accuracy for detecting other vehicles' moving semantics. Improved precision by 23% for cases where other vehicles transition to driving and reduced error by 12% for cases where Autopilot incorrectly detects its lead vehicle as parked. These were achieved by increasing video context in the network, adding more data of these scenarios, and increasing the loss penalty for control-relevant vehicles.
- Extended maximum trajectory optimization horizon, resulting in smoother control for high curvature roads and far away vehicles when driving at highway speeds.
- Improved driving behavior next to row of parked cars in narrow lanes, preferring to offset and staying within lane instead of unnecessarily lane changing away or slowing down.
- Improved back-to-back lane change maneuvers through better fusion between vision-based localization and coarse map lane counts.
- Added text blurbs in the user interface to communicate upcoming maneuvers that FSD Beta plans to make. Also improved the visualization of upcoming slowdowns along the vehicle’s path. Chevrons render at varying opacity and speed to indicate the slowdown intensity, and a solid line appears at locations where the car will come to a stop.
- Improved the recall and precision of object detection, notably reducing the position error of semi-trucks by 10%, increasing the recall and precision of crossing vehicles over 100m away by 3% and 7%, respectively, and increasing the recall of motorbikes by 5%. This was accomplished by implementing additional quality checks in our two million video clip autolabeled dataset.
- Reduced false offsetting around objects in wide lanes and near intersections by improving object kinematics modeling in low speed scenarios.
- Adjusted position of Automatic Blind Spot Camera when FSD Beta is active to prioritize the Autopilot visualization. Drag the camera to save custom positions.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
Over-the-Air (OTA) recall (part of 2022.45.12)
Recall
In accordance with a recent recall (campaign #23V085 for US and #2023-063 for Canada), Tesla is making improvements to the following specific behaviors within FSD Beta:
1. Improved decision logic to proceed through or stop at certain yellow lights by modeling the decision as a tradeoff framework that considers estimated: deceleration required to stop, time to enter and exit the intersection, and the distance traversed across the intersection before the light transitions to red. This should make yellow light handling more natural and human-like.
2. Improved the longitudinal slowdown control profile when leading up to stop sign intersections to make the overall maneuver feel more perceptible and natural.
3. Improved the Tesla’s speed adjustment when entering certain speed zones by allowing for earlier control for detected speed limit signs. The assertiveness of the response when slowing down for detected speed limit signs is determined by the current speed and its difference to the speed indicated by the detected sign. Added a visual glow behind the speed limit icon on the user-interface to alert the driver when the vehicle’s set speed exceeds the detected speed limit by more than 50%. Finally, the option for an absolute Speed Limit offset in FSD Beta was removed; only the percent-based offset will be available.
4. Updated the behavior for certain scenarios where the Tesla may maneuver from a turn lane to continue traveling straight. These maneuvers will now be treated as a lane change, where the turn indicator is used to alert other drivers of the Tesla’s intent.
As a reminder, the driver is responsible for vehicle operation even when FSD Beta is engaged. You must constantly supervise the road, keep your hands on the wheel and be ready to intervene to maintain safety.
- Seen in CA US
- Seen on MS MY
Minor Fixes (part of 2022.45.12)
This release contains minor improvements and bug fixes.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
FSD Beta v11.3.2 (part of 2022.45.11)
Autopilot Improvements
The following release notes for FSD Beta v11.3.2 are unchanged from v11.3.1 which generally means it's a small bug fix release.
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
- Improved recall for close-by cut-in cases by 15%, particularly for large trucks and high-yaw rate scenarios, through an additional 30k auto-labeled clips mined from the fleet. Additionally, expanded and tuned dedicated speed control for cut-in objects.
- Improved the position of ego in wide lanes, by biasing in the direction of the upcoming turn to allow other cars to maneuver around ego.
- Improved handling during scenarios with high curvature or large trucks by offsetting in lane to maintain safe distances to other vehicles on the road and increase comfort.
- Improved behavior for path blockage lane changes in dense traffic. Ego will now maintain more headway in blocked lanes to hedge for possible gaps in dense traffic.
- Improved lane changes in dense traffic scenarios by allowing higher acceleration during the alignment phase. This results in more natural gap selection to overtake adjacent lane vehicles very close to ego.
- Made turns smoother by improving the detection consistency between lanes, lines and road edge predictions. This was accomplished by integrating the latest version of the lane-guidance module into the road edge and lines network.
- Improved accuracy for detecting other vehicles' moving semantics. Improved precision by 23% for cases where other vehicles transition to driving and reduced error by 12% for cases where Autopilot incorrectly detects its lead vehicle as parked. These were achieved by increasing video context in the network, adding more data of these scenarios, and increasing the loss penalty for control-relevant vehicles.
- Extended maximum trajectory optimization horizon, resulting in smoother control for high curvature roads and far away vehicles when driving at highway speeds.
- Improved driving behavior next to row of parked cars in narrow lanes, preferring to offset and staying within lane instead of unnecessarily lane changing away or slowing down.
- Improved back-to-back lane change maneuvers through better fusion between vision-based localization and coarse map lane counts.
- Added text blurbs in the user interface to communicate upcoming maneuvers that FSD Beta plans to make. Also improved the visualization of upcoming slowdowns along the vehicle’s path. Chevrons render at varying opacity and speed to indicate the slowdown intensity, and a solid line appears at locations where the car will come to a stop.
- Improved the recall and precision of object detection, notably reducing the position error of semi-trucks by 10%, increasing the recall and precision of crossing vehicles over 100m away by 3% and 7%, respectively, and increasing the recall of motorbikes by 5%. This was accomplished by implementing additional quality checks in our two million video clip autolabeled dataset.
- Reduced false offsetting around objects in wide lanes and near intersections by improving object kinematics modeling in low speed scenarios.
- Adjusted position of Automatic Blind Spot Camera when FSD Beta is active to prioritize the Autopilot visualization. Drag the camera to save custom positions.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
Over-the-Air (OTA) recall (part of 2022.45.11)
Recall
In accordance with a recent recall (campaign #23V085 for US and #2023-063 for Canada), Tesla is making improvements to the following specific behaviors within FSD Beta:
1. Improved decision logic to proceed through or stop at certain yellow lights by modeling the decision as a tradeoff framework that considers estimated: deceleration required to stop, time to enter and exit the intersection, and the distance traversed across the intersection before the light transitions to red. This should make yellow light handling more natural and human-like.
2. Improved the longitudinal slowdown control profile when leading up to stop sign intersections to make the overall maneuver feel more perceptible and natural.
3. Improved the Tesla’s speed adjustment when entering certain speed zones by allowing for earlier control for detected speed limit signs. The assertiveness of the response when slowing down for detected speed limit signs is determined by the current speed and its difference to the speed indicated by the detected sign. Added a visual glow behind the speed limit icon on the user-interface to alert the driver when the vehicle’s set speed exceeds the detected speed limit by more than 50%. Finally, the option for an absolute Speed Limit offset in FSD Beta was removed; only the percent-based offset will be available.
4. Updated the behavior for certain scenarios where the Tesla may maneuver from a turn lane to continue traveling straight. These maneuvers will now be treated as a lane change, where the turn indicator is used to alert other drivers of the Tesla’s intent.
As a reminder, the driver is responsible for vehicle operation even when FSD Beta is engaged. You must constantly supervise the road, keep your hands on the wheel and be ready to intervene to maintain safety.
- Seen in CA US
- Seen on MX MX(2022+) M3 MY
FSD Beta v11.3.1 (part of 2022.45.11)
Autopilot Improvements
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
-
Improved recall for close-by cut-in cases by 15%, particularly for large trucks and high-yaw rate scenarios, through an additional 30k auto-labeled clips mined from the fleet. Additionally, expanded and tuned dedicated speed control for cut-in objects.
- Improved the position of ego in wide lanes, by biasing in the direction of the upcoming turn to allow other cars to maneuver around ego.
- Improved handling during scenarios with high curvature or large trucks by offsetting in lane to maintain safe distances to other vehicles on the road and increase comfort.
- Improved behavior for path blockage lane changes in dense traffic. Ego will now maintain more headway in blocked lanes to hedge for possible gaps in dense traffic.
- Improved lane changes in dense traffic scenarios by allowing higher acceleration during the alignment phase. This results in more natural gap selection to overtake adjacent lane vehicles very close to ego.
- Made turns smoother by improving the detection consistency between lanes, lines and road edge predictions. This was accomplished by integrating the latest version of the lane-guidance module into the road edge and lines network.
- Improved accuracy for detecting other vehicles' moving semantics. Improved precision by 23% for cases where other vehicles transition to driving and reduced error by 12% for cases where Autopilot incorrectly detects its lead vehicle as parked. These were achieved by increasing video context in the network, adding more data of these scenarios, and increasing the loss penalty for control-relevant vehicles.
- Extended maximum trajectory optimization horizon, resulting in smoother control for high curvature roads and far away vehicles when driving at highway speeds.
- Improved driving behavior next to row of parked cars in narrow lanes, preferring to offset and staying within lane instead of unnecessarily lane changing away or slowing down.
- Improved back-to-back lane change maneuvers through better fusion between vision-based localization and coarse map lane counts.
- Added text blurbs in the user interface to communicate upcoming maneuvers that FSD Beta plans to make. Also improved the visualization of upcoming slowdowns along the vehicle’s path. Chevrons render at varying opacity and speed to indicate the slowdown intensity, and a solid line appears at locations where the car will come to a stop.
- Improved the recall and precision of object detection, notably reducing the position error of semi-trucks by 10%, increasing the recall and precision of crossing vehicles over 100m away by 3% and 7%, respectively, and increasing the recall of motorbikes by 5%. This was accomplished by implementing additional quality checks in our two million video clip autolabeled dataset.
- Reduced false offsetting around objects in wide lanes and near intersections by improving object kinematics modeling in low speed scenarios.
Extras (part of 2022.45.11)
There is a lot of speculation that the Tesla Vision Parking sensors (USS) replacement will be included in this release. We have currently not seen any car with it mentioned and therefore we don't mention it.
We can however report some of the undocumented extras we've already seen on other releases are still present, including:
- New visuals that have been widely seen on the various youtube channels. This includes notification of what the car is planning to do, a welcome addition especially if this is rolled out to the wider none FSDb users.
- Voice feeback following a disengagement where the data sent back to Tesla can be augmented by a driver audi description of what happened.
- The ability to reduce lane changes to a minimal level
- FSDb v11.x has resulted in a new layout of FSD options and controls. As part of these changes you can also change the profile between Chill and Assertive using the steering wheel controls.
- Seen in CA US
- Seen on M3 MY
Park Assist (part of 2022.45.11)
Autopilot Improvements
Tesla Vision Park Assist provides visual and audio alerts of surrounding objects. This feature uses the occupancy network to predict high-definition outlines of objects 360 degrees around the car.
Note: Tesla Vision Park Assist is for guidance purposes only and is not a substitute for an aware driver. Please be attentive and avoid obstacles as required.
- Seen in US
- Seen on M3
Minor Fixes (part of 2022.45.10)
This release contains minor improvements and bug fixes.
- Seen in US
- Seen on MX MS(2021+) MX(2022+) M3 MY
Full Self-Driving (Beta) (part of 2022.45.10)
Autopilot Improvements
You can enable Full Self-Driving (Beta) by tapping 'Control' > 'Autopilot' > 'Full Self-Driving (Beta)' and following the instructions.
Full Self-Driving is in early limited access Beta and must be used with additional caution. It may do the wrong thing at the worst time, so you must always keep your hands on the wheel and pay extra attention to the road. Do not become complacent. When Full Self-Driving is enabled your vehicle will make lane changes off highway, select forks to follow your navigation route, navigate around other vehicles and objects, and make left and right turns. Use Full Self-Driving in limited Beta only if you will pay constant attention to the road, and be prepared to act immediately, especially around blind corners, crossing intersections, and in narrow driving situations.
Your vehicle is running on Tesla Vision! Note that Tesla Vision also includes some temporary limitations, follow distance is limited to 2-7 and Autopilot top speed is 85 mph.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
FSD Beta v11.3.1 (part of 2022.45.10)
Autopilot Improvements
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
- Improved recall for close-by cut-in cases by 15%, particularily for large trucks and high-yaw rate scenarios, through an additional 30k auto-labelled clips mined from the fleet. Additionally, expaned and tuned dedicated speed control for cut-in objects.
- Improved the position of ego in wide lanes, by biasing in the direction of the upcoming turn to allow other cars to maneuver around ego.
- Improved handling during scenarios with high curvature or large trucks by offsetting in lane to maintain safe distances to other vehicles on the road and increase comfort.
- Improved behavior for path blockage lane changes in dense traffic. Ego will now maintain more headway in blocked lanes to hedge for possible gaps in dense traffic.
- Improved lane changes in dense traffic scenarios by allowing higher acceleration during the alignment phase. This results in more natural gap selection to overtake adjacent lane vehicles very close to ego.
- Made turns smoother by improving the detection consistency between lanes, lines and road edge predictions. This was accomplished by integrating the latest version of the lane-guidance module into the road edge and lines network.
- Improved accuracy for detecting other vehicles' moving semantics. Improved precision by 23% for cases where other vehicles transition to driving and reduced error by 12% for cases where Autopilot incorrectly detects its lead vehicle as parked.These were achieved by increasing video context in the network, adding more data of these scenarios, and increasing the loss penalty for control-relevant vehicles.
- Extended maximum trajectory optimization horizon, resulting in smoother control for high curvature roads and far away vehicles when driving at highway speeds.
- Improved driving behavior next to row of parked cars in narrow lanes, preferring to offset and staying within lane instead of unnecessarily lane changing away or slowing down.
- Improved back-to-back lane change maneuvers through better fusion between vision-based localization and coarse map lane counts.
- Added text blurbs in the user interface to communicate upcoming maneuvers that FSD Beta plans to make. Also improved the visualization of upcoming slowdowns along the vehicle's path. Chevrons render at varying opacity and speed to indicate the slowdown intensity, and a solid line appears at locations where the car will come to a stop.
- Improved the recall and precision of object detection, notably reducing the position error of semi-trucks by 10%, increasing the recall and precision of crossing vehicles over 100m away by 3% and 7%, respectively, and increasing the recall of motorbikes by 5%. This
was accomplished by implementing additional quality checks in our two million video clip autolabeled dataset.
- Reduced false offsetting around objects in wide lanes and near intersections by improving object kinematics modeling in low speed scenarios.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
Over-the-Air (OTA) recall (part of 2022.45.10)
Recall
In accordance with a recent recall (campaign #23V085 for US and #2023-063 for Canada), Tesla is making improvements to the following specific behaviors within FSD Beta:
- Improved decision logic to proceed through or stop at certain yellow lights by modeling the decision as a tradeoff framework that considers estimated: deceleration required to stop, time to enter and exit the intersection, and the distance traversed across the intersection before the light transitions to red. This should make yellow light handling more natural and human-like.
- Improved the longitudinal slowdown control profile when leading up to stop sign intersections to make the overall maneuver feel more perceptible and natural.
- Improved the Tesla’s speed adjustment when entering certain speed zones by allowing for earlier control for detected speed limit signs. The assertiveness of the response when slowing down for detected speed limit signs is determined by the current speed and its difference to the speed indicated by the detected sign. Added a visual glow behind the speed limit icon on the user-interface to alert the driver when the vehicle’s set speed exceeds the detected speed limit by more than 50%. Finally, the option for an absolute Speed Limit offset in FSD Beta was removed; only the percent-based offset will be available.
- Updated the behavior for certain scenarios where the Tesla may maneuver from a turn lane to continue traveling straight. These maneuvers will now be treated as a lane change, where the turn indicator is used to alert other drivers of the Tesla’s intent.
As a reminder, the driver is responsible for vehicle operation even when FSD Beta is engaged. You must constantly supervise the road, keep your hands on the wheel and be ready to intervene to maintain safety.

- Seen on MX MS(2021+) MX(2022+) M3 MY
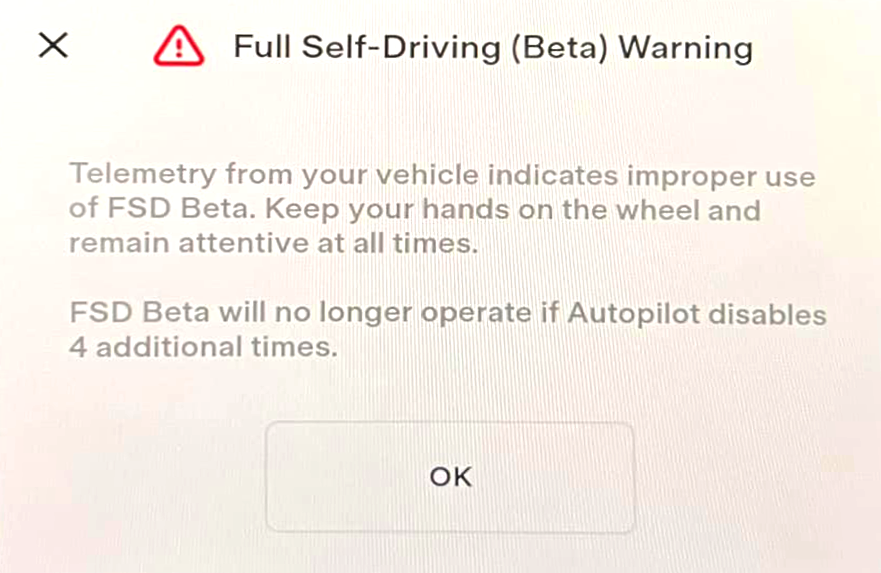
Full Self Driving (Beta) Suspension (part of 2022.45.10)
Autopilot Improvements
The FSD City Streets Beta gives a lot of autonomous potential to the driver while still being a level 2 system. As such, inappropriate use is a risk and Tesla are reinforcing their warnings. This includes detection of steering defeat cheats where some owners were attaching a weight to the steering sheel to fool the car into thinking the steering wheel was being held. This has changed slightly with 2022.44.30.5 and the changed wording is highlighted below. The full release note message follows:
For maximum safety and accountability, use of Full Self-Driving (Beta) will be suspended if improper usage is detected. Improper usage is when you, or another driver of your vehicle, receive five 'Forced Autopilot Disengagements'. A disengagement is when the Autopilot system disengages for the remainder of a trip after the driver receives several audio and visual warnings for inattentiveness. Driver-initiated disengagements do not count as improper usage and are expected from the driver. Keep your hands on the wheel and remain attentive at all times. Use of any hand-held devices while using Autopilot is not allowed.
The warning drivers get looks like this:

- Seen on MX MS(2021+) MX(2022+) M3 MY
Driving Visualization Improvements (part of 2022.45.10)
Autopilot Improvements
To view an expanded driving visualization when in drive with Full Self-Driving enabled, drag the light gray visualization bar to the right.
- Seen on MX MS(2021+) MX(2022+) M3 MY
Cabin Camera (part of 2022.45.10)
Autopilot Improvements
The cabin camera above your rearview mirror can now detect and alert driver inattentiveness and provide you with audible alerts to remind you to keep your etes on the road when Autopilot is engaged. Camera images do not leave the car itself, which means that the system cannot save or transmit information unless you enable data sharing. To change your data settings, tap Controls > Software > Data Sharing on your car's touchscreen. Cabin Camera does not perform facial recognition or any other method of identity verification.
- Seen in US
- Seen on MS(2021+) MX(2022+)
Steam (Beta) (part of 2022.45.10)
Arcade Improvements
Access the Steam store directly from your Tesla. Buy and play immersive games that have been verified on Steam Deck. With Steam’s cloud synchronization, resume your game from your Tesla or any Steam device. To access Steam, tap the Application Launcher > Arcade.
Note: This feature requires Premium Connectivity.
While this has been announced before, it is available on 2021+ Model S and Model X with 16GB of Infotainment RAM

- Seen on MS(2021+) MX(2022+) M3 MY
Apple Music (part of 2022.45.10)
Media Improvements
Stream over 100 million songs and 30,000 playlists ad-free. Listen to your entire library, discover new music, and tune into live radio stations. To access Apple Music, tap the Apple Music icon in the Application Launcher, scan the QR code with your mobile device, and login with your Apple ID.
Note: A Premium Connectivity subscription is required to stream Apple Music over a cellular connection.
These release notes have been seen many times before.
FSD Beta 11.3 (2022.45.5) (part of 2022.45.5)
FSDb software v11.3 Internal staff release. It's been a long time coming, and it's technically still not here, but FSDb v11.3 is now being distributed to Tesla staff and is a step closer to a public roll out. We've talked about the advantages of single stack before, and we expect those benefits to be in ALL cars once the single stack element starts rolling out, even if the FSDb features are limited to the Amercian market.
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
- Added voice drive-notes. After an intervention, you can now send Tesla an anonymous voice message describing your experience to help improve Autopilot.
- Expanded Automatic Emergency Braking (AEB) to handle vehicles that cross ego's path. This includes cases where other vehicles run their red light or turn across ego's path, stealing the right-of-way. Replay of previous collisions of this type suggests that 49% of the events would be mitigated by the new behavior. This improvement is now active in both manual driving and autopilot operation.
- Improved autopilot reaction time to red light runners and stop sign runners by 500ms, by increased reliance on object's instantaneous kinematics along with trajectory estimates.
- Added a long-range highway lanes network to enable earlier response to blocked lanes and high curvature.
- Reduced goal pose prediction error for candidate trajectory neural network by 40% and reduced runtime by 3X. This was achieved by improving the dataset using heavier and more robust offline optimization, increasing the size of this improved dataset by 4X, and implementing a better architecture and feature space.
- Improved occupancy network detections by oversampling on 180K challenging videos including rain reflections, road debris, and high curvature.
- Improved recall for close-by cut-in cases by 20% by adding 40k autolabeled fleet clips of this scenario to the dataset. Also improved handling of cut-in cases by improved modeling of their motion into ego's lane, leveraging the same for smoother lateral and longitudinal control for cut-in objects.
- Added "lane guidance module and perceptual loss to the Road Edges and Lines network, improving the absolute recall of lines by 6% and the absolute recall of road edges by 7%.
- Improved overall geometry and stability of lane predictions by updating the "lane guidance" module representation with information relevant to predicting crossing and oncoming lanes.
- Improved handling through high speed and high curvature scenarios by offsetting towards inner lane lines.
- Improved lane changes, including: earlier detection and handling for simultaneous lane changes, better gap selection when approaching deadlines, better integration between speed-based and nav-based lane change decisions and more differentiation between the FSD driving profiles with respect to speed lane changes.
- Improved longitudinal control response smoothness when following lead vehicles by better modeling the possible effect of lead vehicles’ brake lights on their future speed profiles.
- Improved detection of rare objects by 18% and reduced the depth error to large trucks by 9%, primarily from migrating to more densely supervised autolabeled datasets.
- Improved semantic detections for school busses by 12% and vehicles transitioning from stationary-to-driving by 15%. This was achieved by improving dataset label accuracy and increasing dataset size by 5%.
- Improved decision making at crosswalks by leveraging neural network based ego trajectory estimation in place of approximated kinematic models.
- Improved reliability and smoothness of merge control, by deprecating legacy merge region tasks in favor of merge topologies derived from vector lanes.
- Unlocked longer fleet telemetry clips (by up to 26%) by balancing compressed IPC buffers and optimized write scheduling across twin SOCs.
- Seen in US
- Seen on MS(2021+) M3
Minor Fixes (part of 2022.45.5)
While FSDb notes have been circulating for this release, the notes actually attached to the car are that its a Minor Fixes release.
This release contains minor improvements and bug fixes.
How do I get the latest Software Update from Tesla?
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
FSD Beta v11.3.6 (part of 2022.45.15)
Autopilot Improvements
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
- Improved recall for close-by cut-in cases by 15%, particularly for large trucks and high-yaw rate scenarios, through an additional 30k auto-labeled clips mined from the fleet. Additionally, expanded and tuned dedicated speed control for cut-in objects.
- Improved the position of ego in wide lanes, by biasing in the direction of the upcoming turn to allow other cars to maneuver around ego.
- Improved handling during scenarios with high curvature or large trucks by offsetting in lane to maintain safe distances to other vehicles on the road and increase comfort.
- Improved behavior for path blockage lane changes in dense traffic. Ego will now maintain more headway in blocked lanes to hedge for possible gaps in dense traffic.
- Improved lane changes in dense traffic scenarios by allowing higher acceleration during the alignment phase. This results in more natural gap selection to overtake adjacent lane vehicles very close to ego.
- Made turns smoother by improving the detection consistency between lanes, lines and road edge predictions. This was accomplished by integrating the latest version of the lane-guidance module into the road edge and lines network.
- Improved accuracy for detecting other vehicles' moving semantics. Improved precision by 23% for cases where other vehicles transition to driving and reduced error by 12% for cases where Autopilot incorrectly detects its lead vehicle as parked. These were achieved by increasing video context in the network, adding more data of these scenarios, and increasing the loss penalty for control-relevant vehicles.
- Extended maximum trajectory optimization horizon, resulting in smoother control for high curvature roads and far away vehicles when driving at highway speeds.
- Improved driving behavior next to row of parked cars in narrow lanes, preferring to offset and staying within lane instead of unnecessarily lane changing away or slowing down.
- Improved back-to-back lane change maneuvers through better fusion between vision-based localization and coarse map lane counts.
- Added text blurbs in the user interface to communicate upcoming maneuvers that FSD Beta plans to make. Also improved the visualization of upcoming slowdowns along the vehicle’s path. Chevrons render at varying opacity and speed to indicate the slowdown intensity, and a solid line appears at locations where the car will come to a stop.
- Improved the recall and precision of object detection, notably reducing the position error of semi-trucks by 10%, increasing the recall and precision of crossing vehicles over 100m away by 3% and 7%, respectively, and increasing the recall of motorbikes by 5%. This was accomplished by implementing additional quality checks in our two million video clip autolabeled dataset.
- Reduced false offsetting around objects in wide lanes and near intersections by improving object kinematics modeling in low speed scenarios.
- Adjusted position of Automatic Blind Spot Camera when FSD Beta is active to prioritize the Autopilot visualization. Drag the camera to save custom positions.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
Over-the-Air (OTA) recall (part of 2022.45.15)
Recall
In accordance with a recent recall (campaign #23V085 for US and #2023-063 for Canada), Tesla is making improvements to the following specific behaviors within FSD Beta:
1. Improved decision logic to proceed through or stop at certain yellow lights by modeling the decision as a tradeoff framework that considers estimated: deceleration required to stop, time to enter and exit the intersection, and the distance traversed across the intersection before the light transitions to red. This should make yellow light handling more natural and human-like.
2. Improved the longitudinal slowdown control profile when leading up to stop sign intersections to make the overall maneuver feel more perceptible and natural.
3. Improved the Tesla’s speed adjustment when entering certain speed zones by allowing for earlier control for detected speed limit signs. The assertiveness of the response when slowing down for detected speed limit signs is determined by the current speed and its difference to the speed indicated by the detected sign. Added a visual glow behind the speed limit icon on the user-interface to alert the driver when the vehicle’s set speed exceeds the detected speed limit by more than 50%. Finally, the option for an absolute Speed Limit offset in FSD Beta was removed; only the percent-based offset will be available.
4. Updated the behavior for certain scenarios where the Tesla may maneuver from a turn lane to continue traveling straight. These maneuvers will now be treated as a lane change, where the turn indicator is used to alert other drivers of the Tesla’s intent.
As a reminder, the driver is responsible for vehicle operation even when FSD Beta is engaged. You must constantly supervise the road, keep your hands on the wheel and be ready to intervene to maintain safety.
- Seen in CA US
- Seen on M3 MY
Park Assist (part of 2022.45.15)
Autopilot Improvements
Tesla Vision Park Assist provides visual and audio alerts of surrounding objects. This feature uses the occupancy network to predict high-definition outlines of objects 360 degrees around the car.
Note: Tesla Vision Park Assist is for guidance purposes only and is not a substitute for an aware driver. Please be attentive and avoid obstacles as required.
- Seen in CA US
- Seen on MX MX(2022+) M3 MY
Minor Fixes (part of 2022.45.15)
This release contains minor improvements and bug fixes.
- Seen in CA US
- Seen on M3 MY
Park Assist (part of 2022.45.14)
Autopilot Improvements
Tesla Vision Park Assist provides visual and audio alerts of surrounding objects. This feature uses the occupancy network to predict high-definition outlines of objects 360 degrees around the car.
Note: Tesla Vision Park Assist is for guidance purposes only and is not a substitute for an aware driver. Please be attentive and avoid obstacles as required.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
FSD Beta v11.3.5 (part of 2022.45.14)
Autopilot Improvements
This is a release in tandem with 2022.45.13 which are being sent to cars with and without parking sensors. We provide a heatmap here showing which cars are receiving this release.
We have also only seen this release being sent to 2023 model year cars which would also support this theory
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
- Improved recall for close-by cut-in cases by 15%, particularly for large trucks and high-yaw rate scenarios, through an additional 30k auto-labeled clips mined from the fleet. Additionally, expanded and tuned dedicated speed control for cut-in objects.
- Improved the position of ego in wide lanes, by biasing in the direction of the upcoming turn to allow other cars to maneuver around ego.
- Improved handling during scenarios with high curvature or large trucks by offsetting in lane to maintain safe distances to other vehicles on the road and increase comfort.
- Improved behavior for path blockage lane changes in dense traffic. Ego will now maintain more headway in blocked lanes to hedge for possible gaps in dense traffic.
- Improved lane changes in dense traffic scenarios by allowing higher acceleration during the alignment phase. This results in more natural gap selection to overtake adjacent lane vehicles very close to ego.
- Made turns smoother by improving the detection consistency between lanes, lines and road edge predictions. This was accomplished by integrating the latest version of the lane-guidance module into the road edge and lines network.
- Improved accuracy for detecting other vehicles' moving semantics. Improved precision by 23% for cases where other vehicles transition to driving and reduced error by 12% for cases where Autopilot incorrectly detects its lead vehicle as parked. These were achieved by increasing video context in the network, adding more data of these scenarios, and increasing the loss penalty for control-relevant vehicles.
- Extended maximum trajectory optimization horizon, resulting in smoother control for high curvature roads and far away vehicles when driving at highway speeds.
- Improved driving behavior next to row of parked cars in narrow lanes, preferring to offset and staying within lane instead of unnecessarily lane changing away or slowing down.
- Improved back-to-back lane change maneuvers through better fusion between vision-based localization and coarse map lane counts.
- Added text blurbs in the user interface to communicate upcoming maneuvers that FSD Beta plans to make. Also improved the visualization of upcoming slowdowns along the vehicle’s path. Chevrons render at varying opacity and speed to indicate the slowdown intensity, and a solid line appears at locations where the car will come to a stop.
- Improved the recall and precision of object detection, notably reducing the position error of semi-trucks by 10%, increasing the recall and precision of crossing vehicles over 100m away by 3% and 7%, respectively, and increasing the recall of motorbikes by 5%. This was accomplished by implementing additional quality checks in our two million video clip autolabeled dataset.
- Reduced false offsetting around objects in wide lanes and near intersections by improving object kinematics modeling in low speed scenarios.
- Adjusted position of Automatic Blind Spot Camera when FSD Beta is active to prioritize the Autopilot visualization. Drag the camera to save custom positions.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
Over-the-Air (OTA) recall (part of 2022.45.14)
Recall
In accordance with a recent recall (campaign #23V085 for US and #2023-063 for Canada), Tesla is making improvements to the following specific behaviors within FSD Beta:
1. Improved decision logic to proceed through or stop at certain yellow lights by modeling the decision as a tradeoff framework that considers estimated: deceleration required to stop, time to enter and exit the intersection, and the distance traversed across the intersection before the light transitions to red. This should make yellow light handling more natural and human-like.
2. Improved the longitudinal slowdown control profile when leading up to stop sign intersections to make the overall maneuver feel more perceptible and natural.
3. Improved the Tesla’s speed adjustment when entering certain speed zones by allowing for earlier control for detected speed limit signs. The assertiveness of the response when slowing down for detected speed limit signs is determined by the current speed and its difference to the speed indicated by the detected sign. Added a visual glow behind the speed limit icon on the user-interface to alert the driver when the vehicle’s set speed exceeds the detected speed limit by more than 50%. Finally, the option for an absolute Speed Limit offset in FSD Beta was removed; only the percent-based offset will be available.
4. Updated the behavior for certain scenarios where the Tesla may maneuver from a turn lane to continue traveling straight. These maneuvers will now be treated as a lane change, where the turn indicator is used to alert other drivers of the Tesla’s intent.
As a reminder, the driver is responsible for vehicle operation even when FSD Beta is engaged. You must constantly supervise the road, keep your hands on the wheel and be ready to intervene to maintain safety.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
FSD Beta v11.3.4 (part of 2022.45.13)
Autopilot Improvements
Now on wider release, and seems to be part of a release pair with FSDb v11.3.5 covering cars with and without USS. We provide a heatmap here showing which cars are receiving this release.
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
- Improved recall for close-by cut-in cases by 15%, particularly for large trucks and high-yaw rate scenarios, through an additional 30k auto-labeled clips mined from the fleet. Additionally, expanded and tuned dedicated speed control for cut-in objects.
- Improved the position of ego in wide lanes, by biasing in the direction of the upcoming turn to allow other cars to maneuver around ego.
- Improved handling during scenarios with high curvature or large trucks by offsetting in lane to maintain safe distances to other vehicles on the road and increase comfort.
- Improved behavior for path blockage lane changes in dense traffic. Ego will now maintain more headway in blocked lanes to hedge for possible gaps in dense traffic.
- Improved lane changes in dense traffic scenarios by allowing higher acceleration during the alignment phase. This results in more natural gap selection to overtake adjacent lane vehicles very close to ego.
- Made turns smoother by improving the detection consistency between lanes, lines and road edge predictions. This was accomplished by integrating the latest version of the lane-guidance module into the road edge and lines network.
- Improved accuracy for detecting other vehicles' moving semantics. Improved precision by 23% for cases where other vehicles transition to driving and reduced error by 12% for cases where Autopilot incorrectly detects its lead vehicle as parked. These were achieved by increasing video context in the network, adding more data of these scenarios, and increasing the loss penalty for control-relevant vehicles.
- Improved driving behavior next to row of parked cars in narrow lanes, preferring to offset and staying within lane instead of unnecessarily lane changing away or slowing down.
- Improved back-to-back lane change maneuvers through better fusion between vision-based localization and coarse map lane counts.
- Added text blurbs in the user interface to communicate upcoming maneuvers that FSD Beta plans to make. Also improved the visualization of upcoming slowdowns along the vehicle’s path. Chevrons render at varying opacity and speed to indicate the slowdown intensity, and a solid line appears at locations where the car will come to a stop.
- Improved the recall and precision of object detection, notably reducing the position error of semi-trucks by 10%, increasing the recall and precision of crossing vehicles over 100m away by 3% and 7%, respectively, and increasing the recall of motorbikes by 5%. This was accomplished by implementing additional quality checks in our two million video clip autolabeled dataset.
- Reduced false offsetting around objects in wide lanes and near intersections by improving object kinematics modeling in low speed scenarios.
- Adjusted position of Automatic Blind Spot Camera when FSD Beta is active to prioritize the Autopilot visualization. Drag the camera to save custom positions.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
Over-the-Air (OTA) recall (part of 2022.45.13)
Recall
In accordance with a recent recall (campaign #23V085 for US and #2023-063 for Canada), Tesla is making improvements to the following specific behaviors within FSD Beta:
1. Improved decision logic to proceed through or stop at certain yellow lights by modeling the decision as a tradeoff framework that considers estimated: deceleration required to stop, time to enter and exit the intersection, and the distance traversed across the intersection before the light transitions to red. This should make yellow light handling more natural and human-like.
2. Improved the longitudinal slowdown control profile when leading up to stop sign intersections to make the overall maneuver feel more perceptible and natural.
3. Improved the Tesla’s speed adjustment when entering certain speed zones by allowing for earlier control for detected speed limit signs. The assertiveness of the response when slowing down for detected speed limit signs is determined by the current speed and its difference to the speed indicated by the detected sign. Added a visual glow behind the speed limit icon on the user-interface to alert the driver when the vehicle’s set speed exceeds the detected speed limit by more than 50%. Finally, the option for an absolute Speed Limit offset in FSD Beta was removed; only the percent-based offset will be available.
4. Updated the behavior for certain scenarios where the Tesla may maneuver from a turn lane to continue traveling straight. These maneuvers will now be treated as a lane change, where the turn indicator is used to alert other drivers of the Tesla’s intent.
As a reminder, the driver is responsible for vehicle operation even when FSD Beta is engaged. You must constantly supervise the road, keep your hands on the wheel and be ready to intervene to maintain safety.
- Seen in CA US
- Seen on M3 MY
Park Assist (part of 2022.45.13)
Autopilot Improvements
Tesla Vision Park Assist provides visual and audio alerts of surrounding objects. This feature uses the occupancy network to predict high-definition outlines of objects 360 degrees around the car.
Note: Tesla Vision Park Assist is for guidance purposes only and is not a substitute for an aware driver. Please be attentive and avoid obstacles as required.
- Seen in CA US
- Seen on M3 MY
Park Assist Issues (part of 2022.45.13)
While Tesla Vision Park assist is in 2023.6.9, it is not without it's issues. In good light and with curbs and verticle walls, it can work reasonably well, howeverthere are a number of scenarios where it seems to fail:
- General failure to be available, especially in the dark or in rain.
- Posts can be missed completely
- Can render walls as vehicles and can even suggest an adjacent vehicle is overlapping your car
- Start up time can be 15-20 seconds once you get into the car before being active.
It is not yet parity with USS, and Tesla are still to enable auto park, summon and smart summon.
- Seen in US
- Seen on M3
Minor Fixes (part of 2022.45.13)
This release contains minor improvements and bug fixes.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
FSD Beta v11.3.3 (part of 2022.45.12)
Autopilot Improvements
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
- Improved recall for close-by cut-in cases by 15%, particularly for large trucks and high-yaw rate scenarios, through an additional 30k auto-labeled clips mined from the fleet. Additionally, expanded and tuned dedicated speed control for cut-in objects.
- Improved the position of ego in wide lanes, by biasing in the direction of the upcoming turn to allow other cars to maneuver around ego.
- Improved handling during scenarios with high curvature or large trucks by offsetting in lane to maintain safe distances to other vehicles on the road and increase comfort.
- Improved behavior for path blockage lane changes in dense traffic. Ego will now maintain more headway in blocked lanes to hedge for possible gaps in dense traffic.
- Improved lane changes in dense traffic scenarios by allowing higher acceleration during the alignment phase. This results in more natural gap selection to overtake adjacent lane vehicles very close to ego.
- Made turns smoother by improving the detection consistency between lanes, lines and road edge predictions. This was accomplished by integrating the latest version of the lane-guidance module into the road edge and lines network.
- Improved accuracy for detecting other vehicles' moving semantics. Improved precision by 23% for cases where other vehicles transition to driving and reduced error by 12% for cases where Autopilot incorrectly detects its lead vehicle as parked. These were achieved by increasing video context in the network, adding more data of these scenarios, and increasing the loss penalty for control-relevant vehicles.
- Extended maximum trajectory optimization horizon, resulting in smoother control for high curvature roads and far away vehicles when driving at highway speeds.
- Improved driving behavior next to row of parked cars in narrow lanes, preferring to offset and staying within lane instead of unnecessarily lane changing away or slowing down.
- Improved back-to-back lane change maneuvers through better fusion between vision-based localization and coarse map lane counts.
- Added text blurbs in the user interface to communicate upcoming maneuvers that FSD Beta plans to make. Also improved the visualization of upcoming slowdowns along the vehicle’s path. Chevrons render at varying opacity and speed to indicate the slowdown intensity, and a solid line appears at locations where the car will come to a stop.
- Improved the recall and precision of object detection, notably reducing the position error of semi-trucks by 10%, increasing the recall and precision of crossing vehicles over 100m away by 3% and 7%, respectively, and increasing the recall of motorbikes by 5%. This was accomplished by implementing additional quality checks in our two million video clip autolabeled dataset.
- Reduced false offsetting around objects in wide lanes and near intersections by improving object kinematics modeling in low speed scenarios.
- Adjusted position of Automatic Blind Spot Camera when FSD Beta is active to prioritize the Autopilot visualization. Drag the camera to save custom positions.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
Over-the-Air (OTA) recall (part of 2022.45.12)
Recall
In accordance with a recent recall (campaign #23V085 for US and #2023-063 for Canada), Tesla is making improvements to the following specific behaviors within FSD Beta:
1. Improved decision logic to proceed through or stop at certain yellow lights by modeling the decision as a tradeoff framework that considers estimated: deceleration required to stop, time to enter and exit the intersection, and the distance traversed across the intersection before the light transitions to red. This should make yellow light handling more natural and human-like.
2. Improved the longitudinal slowdown control profile when leading up to stop sign intersections to make the overall maneuver feel more perceptible and natural.
3. Improved the Tesla’s speed adjustment when entering certain speed zones by allowing for earlier control for detected speed limit signs. The assertiveness of the response when slowing down for detected speed limit signs is determined by the current speed and its difference to the speed indicated by the detected sign. Added a visual glow behind the speed limit icon on the user-interface to alert the driver when the vehicle’s set speed exceeds the detected speed limit by more than 50%. Finally, the option for an absolute Speed Limit offset in FSD Beta was removed; only the percent-based offset will be available.
4. Updated the behavior for certain scenarios where the Tesla may maneuver from a turn lane to continue traveling straight. These maneuvers will now be treated as a lane change, where the turn indicator is used to alert other drivers of the Tesla’s intent.
As a reminder, the driver is responsible for vehicle operation even when FSD Beta is engaged. You must constantly supervise the road, keep your hands on the wheel and be ready to intervene to maintain safety.
- Seen in CA US
- Seen on MS MY
Minor Fixes (part of 2022.45.12)
This release contains minor improvements and bug fixes.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
FSD Beta v11.3.2 (part of 2022.45.11)
Autopilot Improvements
The following release notes for FSD Beta v11.3.2 are unchanged from v11.3.1 which generally means it's a small bug fix release.
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
- Improved recall for close-by cut-in cases by 15%, particularly for large trucks and high-yaw rate scenarios, through an additional 30k auto-labeled clips mined from the fleet. Additionally, expanded and tuned dedicated speed control for cut-in objects.
- Improved the position of ego in wide lanes, by biasing in the direction of the upcoming turn to allow other cars to maneuver around ego.
- Improved handling during scenarios with high curvature or large trucks by offsetting in lane to maintain safe distances to other vehicles on the road and increase comfort.
- Improved behavior for path blockage lane changes in dense traffic. Ego will now maintain more headway in blocked lanes to hedge for possible gaps in dense traffic.
- Improved lane changes in dense traffic scenarios by allowing higher acceleration during the alignment phase. This results in more natural gap selection to overtake adjacent lane vehicles very close to ego.
- Made turns smoother by improving the detection consistency between lanes, lines and road edge predictions. This was accomplished by integrating the latest version of the lane-guidance module into the road edge and lines network.
- Improved accuracy for detecting other vehicles' moving semantics. Improved precision by 23% for cases where other vehicles transition to driving and reduced error by 12% for cases where Autopilot incorrectly detects its lead vehicle as parked. These were achieved by increasing video context in the network, adding more data of these scenarios, and increasing the loss penalty for control-relevant vehicles.
- Extended maximum trajectory optimization horizon, resulting in smoother control for high curvature roads and far away vehicles when driving at highway speeds.
- Improved driving behavior next to row of parked cars in narrow lanes, preferring to offset and staying within lane instead of unnecessarily lane changing away or slowing down.
- Improved back-to-back lane change maneuvers through better fusion between vision-based localization and coarse map lane counts.
- Added text blurbs in the user interface to communicate upcoming maneuvers that FSD Beta plans to make. Also improved the visualization of upcoming slowdowns along the vehicle’s path. Chevrons render at varying opacity and speed to indicate the slowdown intensity, and a solid line appears at locations where the car will come to a stop.
- Improved the recall and precision of object detection, notably reducing the position error of semi-trucks by 10%, increasing the recall and precision of crossing vehicles over 100m away by 3% and 7%, respectively, and increasing the recall of motorbikes by 5%. This was accomplished by implementing additional quality checks in our two million video clip autolabeled dataset.
- Reduced false offsetting around objects in wide lanes and near intersections by improving object kinematics modeling in low speed scenarios.
- Adjusted position of Automatic Blind Spot Camera when FSD Beta is active to prioritize the Autopilot visualization. Drag the camera to save custom positions.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
Over-the-Air (OTA) recall (part of 2022.45.11)
Recall
In accordance with a recent recall (campaign #23V085 for US and #2023-063 for Canada), Tesla is making improvements to the following specific behaviors within FSD Beta: 1. Improved decision logic to proceed through or stop at certain yellow lights by modeling the decision as a tradeoff framework that considers estimated: deceleration required to stop, time to enter and exit the intersection, and the distance traversed across the intersection before the light transitions to red. This should make yellow light handling more natural and human-like. 2. Improved the longitudinal slowdown control profile when leading up to stop sign intersections to make the overall maneuver feel more perceptible and natural. 3. Improved the Tesla’s speed adjustment when entering certain speed zones by allowing for earlier control for detected speed limit signs. The assertiveness of the response when slowing down for detected speed limit signs is determined by the current speed and its difference to the speed indicated by the detected sign. Added a visual glow behind the speed limit icon on the user-interface to alert the driver when the vehicle’s set speed exceeds the detected speed limit by more than 50%. Finally, the option for an absolute Speed Limit offset in FSD Beta was removed; only the percent-based offset will be available. 4. Updated the behavior for certain scenarios where the Tesla may maneuver from a turn lane to continue traveling straight. These maneuvers will now be treated as a lane change, where the turn indicator is used to alert other drivers of the Tesla’s intent. As a reminder, the driver is responsible for vehicle operation even when FSD Beta is engaged. You must constantly supervise the road, keep your hands on the wheel and be ready to intervene to maintain safety.
- Seen in CA US
- Seen on MX MX(2022+) M3 MY
FSD Beta v11.3.1 (part of 2022.45.11)
Autopilot Improvements
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
- Improved recall for close-by cut-in cases by 15%, particularly for large trucks and high-yaw rate scenarios, through an additional 30k auto-labeled clips mined from the fleet. Additionally, expanded and tuned dedicated speed control for cut-in objects.
- Improved the position of ego in wide lanes, by biasing in the direction of the upcoming turn to allow other cars to maneuver around ego.
- Improved handling during scenarios with high curvature or large trucks by offsetting in lane to maintain safe distances to other vehicles on the road and increase comfort.
- Improved behavior for path blockage lane changes in dense traffic. Ego will now maintain more headway in blocked lanes to hedge for possible gaps in dense traffic.
- Improved lane changes in dense traffic scenarios by allowing higher acceleration during the alignment phase. This results in more natural gap selection to overtake adjacent lane vehicles very close to ego.
- Made turns smoother by improving the detection consistency between lanes, lines and road edge predictions. This was accomplished by integrating the latest version of the lane-guidance module into the road edge and lines network.
- Improved accuracy for detecting other vehicles' moving semantics. Improved precision by 23% for cases where other vehicles transition to driving and reduced error by 12% for cases where Autopilot incorrectly detects its lead vehicle as parked. These were achieved by increasing video context in the network, adding more data of these scenarios, and increasing the loss penalty for control-relevant vehicles.
- Extended maximum trajectory optimization horizon, resulting in smoother control for high curvature roads and far away vehicles when driving at highway speeds.
- Improved driving behavior next to row of parked cars in narrow lanes, preferring to offset and staying within lane instead of unnecessarily lane changing away or slowing down.
- Improved back-to-back lane change maneuvers through better fusion between vision-based localization and coarse map lane counts.
- Added text blurbs in the user interface to communicate upcoming maneuvers that FSD Beta plans to make. Also improved the visualization of upcoming slowdowns along the vehicle’s path. Chevrons render at varying opacity and speed to indicate the slowdown intensity, and a solid line appears at locations where the car will come to a stop.
- Improved the recall and precision of object detection, notably reducing the position error of semi-trucks by 10%, increasing the recall and precision of crossing vehicles over 100m away by 3% and 7%, respectively, and increasing the recall of motorbikes by 5%. This was accomplished by implementing additional quality checks in our two million video clip autolabeled dataset.
- Reduced false offsetting around objects in wide lanes and near intersections by improving object kinematics modeling in low speed scenarios.
Extras (part of 2022.45.11)
There is a lot of speculation that the Tesla Vision Parking sensors (USS) replacement will be included in this release. We have currently not seen any car with it mentioned and therefore we don't mention it.
We can however report some of the undocumented extras we've already seen on other releases are still present, including:
- New visuals that have been widely seen on the various youtube channels. This includes notification of what the car is planning to do, a welcome addition especially if this is rolled out to the wider none FSDb users.
- Voice feeback following a disengagement where the data sent back to Tesla can be augmented by a driver audi description of what happened.
- The ability to reduce lane changes to a minimal level
- FSDb v11.x has resulted in a new layout of FSD options and controls. As part of these changes you can also change the profile between Chill and Assertive using the steering wheel controls.
- Seen in CA US
- Seen on M3 MY
Park Assist (part of 2022.45.11)
Autopilot Improvements
Tesla Vision Park Assist provides visual and audio alerts of surrounding objects. This feature uses the occupancy network to predict high-definition outlines of objects 360 degrees around the car. Note: Tesla Vision Park Assist is for guidance purposes only and is not a substitute for an aware driver. Please be attentive and avoid obstacles as required.
- Seen in US
- Seen on M3
Minor Fixes (part of 2022.45.10)
This release contains minor improvements and bug fixes.
- Seen in US
- Seen on MX MS(2021+) MX(2022+) M3 MY
Full Self-Driving (Beta) (part of 2022.45.10)
Autopilot Improvements
You can enable Full Self-Driving (Beta) by tapping 'Control' > 'Autopilot' > 'Full Self-Driving (Beta)' and following the instructions.
Full Self-Driving is in early limited access Beta and must be used with additional caution. It may do the wrong thing at the worst time, so you must always keep your hands on the wheel and pay extra attention to the road. Do not become complacent. When Full Self-Driving is enabled your vehicle will make lane changes off highway, select forks to follow your navigation route, navigate around other vehicles and objects, and make left and right turns. Use Full Self-Driving in limited Beta only if you will pay constant attention to the road, and be prepared to act immediately, especially around blind corners, crossing intersections, and in narrow driving situations.
Your vehicle is running on Tesla Vision! Note that Tesla Vision also includes some temporary limitations, follow distance is limited to 2-7 and Autopilot top speed is 85 mph.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
FSD Beta v11.3.1 (part of 2022.45.10)
Autopilot Improvements
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
- Improved recall for close-by cut-in cases by 15%, particularily for large trucks and high-yaw rate scenarios, through an additional 30k auto-labelled clips mined from the fleet. Additionally, expaned and tuned dedicated speed control for cut-in objects.
- Improved the position of ego in wide lanes, by biasing in the direction of the upcoming turn to allow other cars to maneuver around ego.
- Improved handling during scenarios with high curvature or large trucks by offsetting in lane to maintain safe distances to other vehicles on the road and increase comfort.
- Improved behavior for path blockage lane changes in dense traffic. Ego will now maintain more headway in blocked lanes to hedge for possible gaps in dense traffic.
- Improved lane changes in dense traffic scenarios by allowing higher acceleration during the alignment phase. This results in more natural gap selection to overtake adjacent lane vehicles very close to ego.
- Made turns smoother by improving the detection consistency between lanes, lines and road edge predictions. This was accomplished by integrating the latest version of the lane-guidance module into the road edge and lines network.
- Improved accuracy for detecting other vehicles' moving semantics. Improved precision by 23% for cases where other vehicles transition to driving and reduced error by 12% for cases where Autopilot incorrectly detects its lead vehicle as parked.These were achieved by increasing video context in the network, adding more data of these scenarios, and increasing the loss penalty for control-relevant vehicles.
- Extended maximum trajectory optimization horizon, resulting in smoother control for high curvature roads and far away vehicles when driving at highway speeds.
- Improved driving behavior next to row of parked cars in narrow lanes, preferring to offset and staying within lane instead of unnecessarily lane changing away or slowing down.
- Improved back-to-back lane change maneuvers through better fusion between vision-based localization and coarse map lane counts.
- Added text blurbs in the user interface to communicate upcoming maneuvers that FSD Beta plans to make. Also improved the visualization of upcoming slowdowns along the vehicle's path. Chevrons render at varying opacity and speed to indicate the slowdown intensity, and a solid line appears at locations where the car will come to a stop.
- Improved the recall and precision of object detection, notably reducing the position error of semi-trucks by 10%, increasing the recall and precision of crossing vehicles over 100m away by 3% and 7%, respectively, and increasing the recall of motorbikes by 5%. This was accomplished by implementing additional quality checks in our two million video clip autolabeled dataset.
- Reduced false offsetting around objects in wide lanes and near intersections by improving object kinematics modeling in low speed scenarios.
- Seen in CA US
- Seen on MX MS(2021+) MX(2022+) M3 MY
Over-the-Air (OTA) recall (part of 2022.45.10)
Recall
In accordance with a recent recall (campaign #23V085 for US and #2023-063 for Canada), Tesla is making improvements to the following specific behaviors within FSD Beta:
- Improved decision logic to proceed through or stop at certain yellow lights by modeling the decision as a tradeoff framework that considers estimated: deceleration required to stop, time to enter and exit the intersection, and the distance traversed across the intersection before the light transitions to red. This should make yellow light handling more natural and human-like.
- Improved the longitudinal slowdown control profile when leading up to stop sign intersections to make the overall maneuver feel more perceptible and natural.
- Improved the Tesla’s speed adjustment when entering certain speed zones by allowing for earlier control for detected speed limit signs. The assertiveness of the response when slowing down for detected speed limit signs is determined by the current speed and its difference to the speed indicated by the detected sign. Added a visual glow behind the speed limit icon on the user-interface to alert the driver when the vehicle’s set speed exceeds the detected speed limit by more than 50%. Finally, the option for an absolute Speed Limit offset in FSD Beta was removed; only the percent-based offset will be available.
- Updated the behavior for certain scenarios where the Tesla may maneuver from a turn lane to continue traveling straight. These maneuvers will now be treated as a lane change, where the turn indicator is used to alert other drivers of the Tesla’s intent.
As a reminder, the driver is responsible for vehicle operation even when FSD Beta is engaged. You must constantly supervise the road, keep your hands on the wheel and be ready to intervene to maintain safety.
- Seen on MX MS(2021+) MX(2022+) M3 MY
Full Self Driving (Beta) Suspension (part of 2022.45.10)
Autopilot Improvements
The FSD City Streets Beta gives a lot of autonomous potential to the driver while still being a level 2 system. As such, inappropriate use is a risk and Tesla are reinforcing their warnings. This includes detection of steering defeat cheats where some owners were attaching a weight to the steering sheel to fool the car into thinking the steering wheel was being held. This has changed slightly with 2022.44.30.5 and the changed wording is highlighted below. The full release note message follows:
For maximum safety and accountability, use of Full Self-Driving (Beta) will be suspended if improper usage is detected. Improper usage is when you, or another driver of your vehicle, receive five 'Forced Autopilot Disengagements'. A disengagement is when the Autopilot system disengages for the remainder of a trip after the driver receives several audio and visual warnings for inattentiveness. Driver-initiated disengagements do not count as improper usage and are expected from the driver. Keep your hands on the wheel and remain attentive at all times. Use of any hand-held devices while using Autopilot is not allowed.
The warning drivers get looks like this:
- Seen on MX MS(2021+) MX(2022+) M3 MY
Driving Visualization Improvements (part of 2022.45.10)
Autopilot Improvements
To view an expanded driving visualization when in drive with Full Self-Driving enabled, drag the light gray visualization bar to the right.
- Seen on MX MS(2021+) MX(2022+) M3 MY
Cabin Camera (part of 2022.45.10)
Autopilot Improvements
The cabin camera above your rearview mirror can now detect and alert driver inattentiveness and provide you with audible alerts to remind you to keep your etes on the road when Autopilot is engaged. Camera images do not leave the car itself, which means that the system cannot save or transmit information unless you enable data sharing. To change your data settings, tap Controls > Software > Data Sharing on your car's touchscreen. Cabin Camera does not perform facial recognition or any other method of identity verification.
- Seen in US
- Seen on MS(2021+) MX(2022+)
Steam (Beta) (part of 2022.45.10)
Arcade Improvements
Access the Steam store directly from your Tesla. Buy and play immersive games that have been verified on Steam Deck. With Steam’s cloud synchronization, resume your game from your Tesla or any Steam device. To access Steam, tap the Application Launcher > Arcade.
Note: This feature requires Premium Connectivity.
While this has been announced before, it is available on 2021+ Model S and Model X with 16GB of Infotainment RAM
- Seen on MS(2021+) MX(2022+) M3 MY
Apple Music (part of 2022.45.10)
Media Improvements
Stream over 100 million songs and 30,000 playlists ad-free. Listen to your entire library, discover new music, and tune into live radio stations. To access Apple Music, tap the Apple Music icon in the Application Launcher, scan the QR code with your mobile device, and login with your Apple ID.
Note: A Premium Connectivity subscription is required to stream Apple Music over a cellular connection.
These release notes have been seen many times before.
FSD Beta 11.3 (2022.45.5) (part of 2022.45.5)
FSDb software v11.3 Internal staff release. It's been a long time coming, and it's technically still not here, but FSDb v11.3 is now being distributed to Tesla staff and is a step closer to a public roll out. We've talked about the advantages of single stack before, and we expect those benefits to be in ALL cars once the single stack element starts rolling out, even if the FSDb features are limited to the Amercian market.
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
- Added voice drive-notes. After an intervention, you can now send Tesla an anonymous voice message describing your experience to help improve Autopilot.
- Expanded Automatic Emergency Braking (AEB) to handle vehicles that cross ego's path. This includes cases where other vehicles run their red light or turn across ego's path, stealing the right-of-way. Replay of previous collisions of this type suggests that 49% of the events would be mitigated by the new behavior. This improvement is now active in both manual driving and autopilot operation.
- Improved autopilot reaction time to red light runners and stop sign runners by 500ms, by increased reliance on object's instantaneous kinematics along with trajectory estimates.
- Added a long-range highway lanes network to enable earlier response to blocked lanes and high curvature.
- Reduced goal pose prediction error for candidate trajectory neural network by 40% and reduced runtime by 3X. This was achieved by improving the dataset using heavier and more robust offline optimization, increasing the size of this improved dataset by 4X, and implementing a better architecture and feature space.
- Improved occupancy network detections by oversampling on 180K challenging videos including rain reflections, road debris, and high curvature.
- Improved recall for close-by cut-in cases by 20% by adding 40k autolabeled fleet clips of this scenario to the dataset. Also improved handling of cut-in cases by improved modeling of their motion into ego's lane, leveraging the same for smoother lateral and longitudinal control for cut-in objects.
- Added "lane guidance module and perceptual loss to the Road Edges and Lines network, improving the absolute recall of lines by 6% and the absolute recall of road edges by 7%.
- Improved overall geometry and stability of lane predictions by updating the "lane guidance" module representation with information relevant to predicting crossing and oncoming lanes.
- Improved handling through high speed and high curvature scenarios by offsetting towards inner lane lines.
- Improved lane changes, including: earlier detection and handling for simultaneous lane changes, better gap selection when approaching deadlines, better integration between speed-based and nav-based lane change decisions and more differentiation between the FSD driving profiles with respect to speed lane changes.
- Improved longitudinal control response smoothness when following lead vehicles by better modeling the possible effect of lead vehicles’ brake lights on their future speed profiles.
- Improved detection of rare objects by 18% and reduced the depth error to large trucks by 9%, primarily from migrating to more densely supervised autolabeled datasets.
- Improved semantic detections for school busses by 12% and vehicles transitioning from stationary-to-driving by 15%. This was achieved by improving dataset label accuracy and increasing dataset size by 5%.
- Improved decision making at crosswalks by leveraging neural network based ego trajectory estimation in place of approximated kinematic models.
- Improved reliability and smoothness of merge control, by deprecating legacy merge region tasks in favor of merge topologies derived from vector lanes.
- Unlocked longer fleet telemetry clips (by up to 26%) by balancing compressed IPC buffers and optimized write scheduling across twin SOCs.
- Seen in US
- Seen on MS(2021+) M3
Minor Fixes (part of 2022.45.5)
While FSDb notes have been circulating for this release, the notes actually attached to the car are that its a Minor Fixes release.
This release contains minor improvements and bug fixes.
There is o reliable way to get the a software update from Tesla unless it is linked to a service request.
I do not have all the features listed?
Some features are only available on some models, versions of hardware, software options purchased and even countries. We list as much information as we can as to which of those are required for each feature based on the information taken from real cars.